








0731-84284278




Accexp反無人機(jī)系統(tǒng)解決方案

2017-06-16
隨著越來越多的無人機(jī)飛上天空,當(dāng)它們靠近重要區(qū)域時帶來的安全隱患也變得日益嚴(yán)重。2016 年至今,國內(nèi)接連發(fā)生了多起民用無人機(jī)闖入載人民航飛機(jī)航線或機(jī)場范圍的事件。國內(nèi)外的多處政要場所無人機(jī)入侵事件層出不窮;監(jiān)獄、邊防利用無人機(jī)從事違法犯罪的活動時有發(fā)生。2016 年 9 月 21 日,《民用無人駕駛航空器系統(tǒng)空中交通管理辦法》出臺,更有針對性地對無人機(jī)的飛行活動進(jìn)行管理,規(guī)范無人機(jī)的空中交通管理工作。無人機(jī)廠家為保障空域地域安全,為無人機(jī)產(chǎn)品設(shè)置了機(jī)場禁飛區(qū)和限飛區(qū),但無人機(jī)入侵事情仍然頻發(fā),從法律法規(guī)、設(shè)置禁飛區(qū)對無人機(jī)進(jìn)行管制不能完全解決無人機(jī)黑飛帶來的安全隱患。管理人員更希望能從技術(shù)層面上實(shí)現(xiàn)對闖入無人機(jī)的管控。
二 、 反無人機(jī)系統(tǒng)設(shè)計(jì)思路
反無人機(jī)系統(tǒng)的設(shè)計(jì)是以探測發(fā)現(xiàn)和干擾拒止黑飛無人機(jī)為目的。在復(fù)雜的建筑結(jié)構(gòu)、電磁信號環(huán)境下,如何實(shí)現(xiàn)對整個區(qū)域無盲區(qū)的無人機(jī)防御,反無人機(jī)系統(tǒng)本身電磁信號對防護(hù)區(qū)域電子設(shè)施又不造成影響應(yīng)該是設(shè)計(jì)的關(guān)鍵點(diǎn)。目前國內(nèi)外對無人機(jī)的探測手段主要有雷達(dá)、光電、頻譜探測和聲學(xué)四種,而對無人機(jī)實(shí)施打擊的手段主要包括激光火炮、欺騙信號干擾以及壓制信號干擾等。在探測跟蹤方面,雷達(dá)具有距離分辨力高、監(jiān)控距離遠(yuǎn)的特點(diǎn),但對不通視的目標(biāo)不能探測、存在較大盲區(qū);光電設(shè)備具有抗電磁干擾能力強(qiáng),低空探測性能好、圖像分辨率高、目標(biāo)識別能力強(qiáng)的特點(diǎn),但是光電探測跟蹤設(shè)備視場小,不能探測障礙物背后的目標(biāo),也會因?yàn)檎系K物導(dǎo)致跟蹤失鎖的情況;頻譜探測聲探測具有 360°全向探測能力,能夠?qū)N地飛行和遮擋物后的目標(biāo)實(shí)施探測,也可在夜間、雨霧等不良?xì)庀蠊ぷ?,但與雷達(dá)和光探測手段相比,聲測精度較低,探測距離近,而頻譜探測則需要將天線設(shè)計(jì)得較大才能保證探測距離。因此,將各種探測手段集成,進(jìn)行優(yōu)勢互補(bǔ),實(shí)現(xiàn)探測區(qū)域的全覆蓋,同時通過融合,避免僅靠單一的探測手段存在虛警率過高的問題。在攔截方面,激光炮火力擊落無人機(jī),墜毀殘骸可能對地面建筑和人群造成危害,如果無人機(jī)攜帶了生物武器或者核材料,那么會導(dǎo)致更大的破壞力,不適合在機(jī)場、重要場所、商演等場景應(yīng)用;采用欺騙式干擾信號會直接影響機(jī)場所有導(dǎo)航設(shè)備的正常定位,同樣不適用于機(jī)場等區(qū)域。因此,通過雷達(dá)、光電和頻譜以及聲學(xué)多種探測方式,采用壓制信號干擾的方式,結(jié)合保護(hù)區(qū)域地形靈活組建一套具備集探測、識別、跟蹤、干擾拒止一體化能力的反無人機(jī)系統(tǒng)方案是最優(yōu)選擇。
三 、反無人機(jī)系統(tǒng) 設(shè)計(jì)方案
3.1 反無人機(jī)系統(tǒng) 組成及工作原理
Accexp反無人機(jī)系統(tǒng)是具有自主知識產(chǎn)權(quán)的無人機(jī)防御系統(tǒng)。MSAUDS 無人機(jī)系統(tǒng)主要包括探測發(fā)現(xiàn)設(shè)備、跟蹤識別設(shè)備、反無人機(jī)拒止設(shè)備、反向定位和后端管理平臺。

Accexp反無人機(jī)系統(tǒng)由探測單元、跟蹤單元、干擾單元以及后臺監(jiān)控平臺組成。探測單元包括雷達(dá)、頻譜、音頻探測設(shè)備組合使用,識別、跟蹤單元主要包含可見光、紅外光學(xué)傳感器,干擾單元采用固定式干擾裝置。系統(tǒng)部署頻譜探測、雷達(dá)探測或音頻探測等設(shè)備,在防護(hù)邊界高點(diǎn)安裝多子陣低
空雷達(dá),形成一個立體的、多技術(shù)融合探測的低空防護(hù)區(qū)域。同時,可在周界周圍部署光電跟蹤系統(tǒng),根據(jù)探測裝置給出的目標(biāo)位置,光電跟蹤系統(tǒng)能夠?qū)δ繕?biāo)進(jìn)行跟蹤識別,視頻確認(rèn)。系統(tǒng)部署固定射頻干擾器,通過后端監(jiān)控平臺自動聯(lián)動,在偵測到無人機(jī)入侵后,自動發(fā)送干擾信號,迫使無人機(jī)降落或者返航。還可以根據(jù)現(xiàn)場情況,配置車載或手持式射頻干擾器,通過人工巡邏的方式,靈活機(jī)動,對入侵無人機(jī)進(jìn)行干擾和擊落。
3.2 系統(tǒng)特點(diǎn)優(yōu)勢
白名單 過濾 、甄別 入侵 目標(biāo)。 。系統(tǒng)可對防護(hù)區(qū)域的電磁環(huán)境進(jìn)行反復(fù)“學(xué)習(xí)”。在監(jiān)控平臺中設(shè)置頻率白名單,過濾環(huán)境電磁干擾的影響,對入侵目標(biāo)實(shí)施更精確的探測和干擾,極大地降低誤報虛報率。 全天候 、全天時 , 多維立體 無盲區(qū)系統(tǒng)適用于全天候、全天時、復(fù)雜電磁環(huán)境和地理?xiàng)l件,采用多種探測器融合技術(shù)、打造從一維到三維立體無盲區(qū)防護(hù)體系。一體化的自動防控能力、 、 反向定位 操控者
系統(tǒng)集成了對入侵目標(biāo)的探測、發(fā)現(xiàn)、跟蹤、甄別、干擾的一體化能力;并能夠探測定位到操控者的位置。龐大 的數(shù)據(jù)特征庫 ,與時俱進(jìn)的更新擴(kuò)容系統(tǒng)監(jiān)控平臺數(shù)據(jù)庫具有市場主流無人機(jī)的數(shù)據(jù)特征庫,系統(tǒng)能直接判斷出入侵無人機(jī)的品牌型號,數(shù)據(jù)庫內(nèi)容更新與時俱進(jìn)。模塊化 設(shè)計(jì)、 根據(jù)不同應(yīng)用 靈活組建方案系統(tǒng)設(shè)備采用模塊化設(shè)計(jì)并提供豐富的接口,可根據(jù)不同的應(yīng)用場景選配探測前端和干擾裝置、組建最適用的系統(tǒng)方案。
3.3 系統(tǒng)部署 方案
這里我們提供三套反無人機(jī)部署方案分別為: 1. 便攜式 音頻 頻譜探測+ + 光電跟蹤;2. 車載式反無人機(jī)系統(tǒng); 3. 應(yīng)用于 機(jī)場、油庫場景 的 反無人機(jī)系統(tǒng)的部署 (頻譜探測+ + 干擾裝置 在本方案中體現(xiàn) ) 。 便攜式 音頻 頻譜+ + 光電跟蹤 反無人機(jī)系統(tǒng)便攜式音頻頻譜探測+光電跟蹤系統(tǒng)主要是監(jiān)測無人機(jī)漿翼轉(zhuǎn)機(jī)發(fā)出的聲響來判斷防護(hù)區(qū)域是否存在入侵無人機(jī),采用一體化的、帶有紅外激光夜視智能云臺攝像機(jī)跟蹤鎖定目標(biāo)并及時報警。具備 360°全向探測能力,能夠?qū)N地飛行和遮擋物后的目標(biāo)實(shí)施探測,也可在夜間、雨霧等不良?xì)庀蠊ぷ鳎撎紫到y(tǒng)探測距離較近,范圍在半徑 500 米左右,可應(yīng)用于辦公樓酒店,保密室等小型區(qū)域的無人機(jī)防御。

在探測系統(tǒng)安裝初期,系統(tǒng)會利用各種類型無人機(jī)對反無人機(jī)防御系統(tǒng)進(jìn)行反復(fù)訓(xùn)練,優(yōu)化系統(tǒng)數(shù)據(jù),并將其保存在特征數(shù)據(jù)庫里,設(shè)置當(dāng)?shù)仡l率白名單。當(dāng)有無人機(jī)靠近,系統(tǒng)能夠根據(jù)特征數(shù)據(jù)庫的數(shù)據(jù)和現(xiàn)場數(shù)據(jù)的比較來進(jìn)行判別,從而發(fā)現(xiàn)目標(biāo),發(fā)現(xiàn)并告警。同時避免環(huán)境電磁干擾引起誤報虛報。監(jiān)控中心完成對所轄范圍內(nèi)的監(jiān)控資源進(jìn)行集中管理、控制,完成信息的匯集、整合、處理,形成綜合信息,并實(shí)現(xiàn)應(yīng)急聯(lián)動,監(jiān)控中心可使用一臺筆記本或整合到現(xiàn)有安全系統(tǒng)中,也可以安裝到移動終端中實(shí)現(xiàn)實(shí)時監(jiān)控及時報警。下圖為我公司為京東大廈安裝的便攜式音頻頻譜設(shè)備,客戶購買了便攜式反無人機(jī)干擾器,安保人員在接收到應(yīng)急聯(lián)動報警后,使用反無人機(jī)干擾器將無人機(jī)擊落。
3.3.2 車載式反無人機(jī)系統(tǒng)
車載式反無人機(jī)系統(tǒng)由探測單元、跟蹤單元、干擾單元以及后臺監(jiān)控平臺組成。探測單元包括雷達(dá)、頻譜、音頻探測設(shè)備組合使用,雷達(dá)探測主要為遠(yuǎn)距離探測無人機(jī)目標(biāo),頻譜和音頻設(shè)備在車載反無人機(jī)系統(tǒng)中起到近距離探測和補(bǔ)盲的作用。識別、跟蹤單元主要包含可見光、紅外光學(xué)傳感器,干擾單元采用車載式干擾裝置。系統(tǒng)探測單元發(fā)現(xiàn)入侵目標(biāo)后,跟蹤單元鎖定目標(biāo),并通過監(jiān)控中心解算目標(biāo)當(dāng)前位置信息,同時啟動干擾裝置轉(zhuǎn)動轉(zhuǎn)臺調(diào)整發(fā)射角度,達(dá)到將入侵目標(biāo)驅(qū)離,原地降落捕獲等效果。

車載式反無人機(jī)系統(tǒng)同樣具備對黑飛無人機(jī)進(jìn)行探測、識別、跟蹤、攔截的一體化能力,通過固定架設(shè)到出勤車上的探測跟蹤干擾裝置,形成臨時動態(tài)的黑飛無人機(jī)防護(hù)區(qū)域。主要應(yīng)用于重要政要出行、物質(zhì)押運(yùn)、大型商業(yè)活動等場景。
3.3.3 應(yīng) 用于機(jī)場、油庫場景的反無人機(jī)系統(tǒng)
以我公司為武漢天河機(jī)場設(shè)計(jì)的反無人機(jī)系統(tǒng)為例,天河機(jī)場長 5 公里、寬 2.5公里,我們?yōu)樘旌訖C(jī)場提供了兩套解決方案。方案一:雷達(dá)探測+ + 頻譜探測補(bǔ)盲+ + 固定式干擾本方案采用我公司探測距離為 5km 的雷達(dá)兩套,分別裝置在機(jī)場的起飛和降落方位,形成天線主波瓣范圍相對,探測范圍完全覆蓋機(jī)場。同時,雷達(dá)配置水平 360°旋轉(zhuǎn)轉(zhuǎn)臺,通過程序控制轉(zhuǎn)臺水平循環(huán)掃描,俯仰向固定角掃描,可形成機(jī)場外半徑5km 的防護(hù)區(qū)域,起到同時監(jiān)控飛機(jī)起降面的效果。由于雷達(dá)特性,機(jī)場內(nèi)必然存在雷達(dá)盲區(qū),配套采用我公司探測距離為 1km 的頻譜探測儀實(shí)施補(bǔ)盲,機(jī)場共架設(shè) 4 臺頻譜探測儀,實(shí)現(xiàn)無盲區(qū)監(jiān)控,干擾裝置采用 2-3 套(根據(jù)實(shí)地情況考慮設(shè)計(jì)在機(jī)場中布放一臺干擾器)固定式反無人機(jī)干擾裝置,通過監(jiān)控中心實(shí)現(xiàn)與探測設(shè)備的聯(lián)動機(jī)制。另外,對于機(jī)場密集建筑區(qū)域,我方建議配套 1-2 把便攜式反無人機(jī)干擾器或車載式反無人機(jī)裝置實(shí)施人員巡邏監(jiān)控,到達(dá)三維立體的無盲區(qū)防御效果。
如下所示:

方案 二 :頻譜探測+ + 固定式干擾
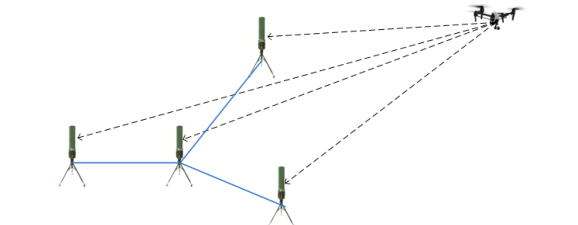
本方案采用被動式探測模式,在機(jī)場四角部署我公司探測距離為 3km 的頻譜探測儀配套四個固定式干擾器,對機(jī)場進(jìn)行黑飛無人機(jī)防御,由于頻譜探測儀全方位的探測特性,該方案可同時實(shí)現(xiàn)對機(jī)場外半3km區(qū)域的防御覆蓋。另外對于機(jī)場密集建筑區(qū)域,我方建議配套 1-2 把便攜式反無人機(jī)干擾器或車載式反無人機(jī)裝置實(shí)施人員巡邏監(jiān)控,同樣到達(dá)三維立體的無盲區(qū)防御效果。后端管理平臺通過計(jì)算機(jī)網(wǎng)絡(luò)連接多個前端系統(tǒng),來實(shí)現(xiàn)對機(jī)場的全方位管控。后端管理平臺通過計(jì)算機(jī)網(wǎng)絡(luò)連接多個前端系統(tǒng),來實(shí)現(xiàn)對機(jī)場的全方位管控。后端管理平臺一般部署在機(jī)場安防指揮中心。
如下圖所示:

3.4 系統(tǒng)功能實(shí)現(xiàn)
MSAUDS 多傳感器融合無人機(jī)系統(tǒng)通過采取多傳感器融合、信息快速傳遞和聯(lián)網(wǎng)、智能化監(jiān)測等技術(shù)手段,解決全天時、全天候及復(fù)雜背景下快速發(fā)現(xiàn)、報知、跟蹤、定位異常目標(biāo)的問題。系統(tǒng)主要具有搜索發(fā)現(xiàn)、跟蹤識別和報警定位、干擾無人飛行器運(yùn)行等功能。
3.4.1 探測 發(fā)現(xiàn) 與反向定位
系統(tǒng)采用音頻探測、頻譜探測、雷達(dá)掃描等多種傳感器集成探測技術(shù),可按實(shí)際需求選擇布防前端探測設(shè)備,實(shí)現(xiàn)全方位、全天候搜索發(fā)現(xiàn)和探測低空、超低空等防衛(wèi)區(qū)域內(nèi)的活動目標(biāo),同時利用頻譜探測的特性可實(shí)現(xiàn)對防護(hù)周邊范圍內(nèi)的操控者進(jìn)行反向定位。系統(tǒng)通過光纖網(wǎng)絡(luò)等通信設(shè)備實(shí)現(xiàn)監(jiān)控前端和監(jiān)控平臺的連接,實(shí)時報告目標(biāo)活動情報信息。
3.4.2 跟蹤識別
通過探測設(shè)備能自動跟蹤探測區(qū)域內(nèi)的活動目標(biāo),通過監(jiān)控屏幕實(shí)時顯示防衛(wèi)區(qū)域內(nèi)報知的活動目標(biāo)的運(yùn)動軌跡,并通過光電跟蹤系統(tǒng)對其進(jìn)行圖像識別、顯示和存儲。系統(tǒng)可在電子地圖上顯示監(jiān)控前端探測監(jiān)控范圍。通過各種前端探測設(shè)備聯(lián)動可準(zhǔn)確提供目標(biāo)坐標(biāo)信息,并可實(shí)時顯示目標(biāo)的位置信息和實(shí)時運(yùn)動軌跡。還可在電子地圖上人工設(shè)置任意形狀的多個報警區(qū)、報警線,可對報警區(qū)內(nèi)和越過報警線的移動目標(biāo)進(jìn)行自動聲光告警。
3.4.3 干擾 與拒止
根據(jù)目標(biāo)位置,可以自動使用固定式反干擾設(shè)備對入侵的無人機(jī)進(jìn)行干擾、迫降等多種措施。也可以使用手持式干擾槍或車載式設(shè)備對入侵無人機(jī)進(jìn)行干擾和拒止。
四 、 系統(tǒng) 設(shè)備產(chǎn)品介紹
4 1 探測設(shè)備
4.1.1 頻譜探測設(shè)備
頻譜探測設(shè)備基于無源定位技術(shù),可采用多個頻譜探測設(shè)備組網(wǎng),根據(jù)不同探測設(shè)備探測到同一目標(biāo)的不同信號值來計(jì)算目標(biāo)的距離、方位角、俯仰角等。同原理可探測鎖定操控者的位置。
性能參數(shù):
探測頻率范圍:0.3—6GHz
探測距離: 1-3 公里(可選配)
測向精度: ≤2°
天線通道:2 路
供電方式:POE
多設(shè)備定位
4.1.2 音頻探測 設(shè)備
音頻探測器由多個麥克風(fēng)陣列組成,每個探測器能檢測到200米內(nèi)通過的無人機(jī)。主要用于密集區(qū)域的補(bǔ)盲。
性能參數(shù):
麥克風(fēng)陣列數(shù)量:32
探測距離: ≥200m
測向精度: ≤5°
供電方式:POE

4.1.3 雷達(dá)探測設(shè)備

多子陣低空雷達(dá)采用全固態(tài)、全相參、兩坐標(biāo)、脈沖多普勒體制。雷達(dá)主要由 8個獨(dú)立的天線子陣、綜合處理分機(jī)、電源分機(jī)等組成。其中綜合處理分機(jī)主要包括發(fā)射組件、頻綜及調(diào)制組件、接收組件、大率開關(guān)組件、信號處理組件、數(shù)據(jù)處理組件等。可通過“蜂窩”區(qū)域組網(wǎng)方式實(shí)現(xiàn)大面積的覆蓋。工作頻段:16GHz;探測距離:3km-5km(可選配)方位覆蓋:360°;高度覆蓋:50m~1000m。探測精度 距離(均方根值):≤12m;方位(均方根值):≤1°。
4 4. .2 2 光電跟蹤設(shè)備
光電跟蹤器采用一體化的、帶有紅外激光夜視智能云臺攝像機(jī),攝像機(jī)集高清晰度彩色攝像機(jī)、 激光照明組件、萬向變速室外云臺、多功能解碼器等。
性能參數(shù):
轉(zhuǎn)動范圍:方位 0°~360°,俯仰-35°~65°;
轉(zhuǎn)動速度:≥60°/s;
定位精度:±0.2°;
分辨率:可見光 795×596,紅外 336×256,9×12;
視場角:可見光 3.4°×4.5°~34°×45°,可放大 10 倍,紅外 9°×12°
通信接口:4G/以太網(wǎng)。

4 .3 干擾拒止設(shè)備
4.3.1 固定式干擾設(shè)備
固定干擾設(shè)備能夠根據(jù)目標(biāo)的位置,有選擇地干擾無人飛行器所使用的不同類型的指揮與控制通信連路。在實(shí)施干擾的過程中,采用智能、比例放大和非動能方式從而減輕附帶影響。

性能參數(shù):
轉(zhuǎn)動范圍:方位 0°~360°,俯仰-35°~65°;
轉(zhuǎn)動速度:≥60°/s;
定位精度:±0.2°;
有效距離:1km-3km(可選配);
工作頻率:1550MHz~1650MHz,2400MHz~2500MHz,5700MHz~5900MHz(可擴(kuò)展);
整機(jī)功耗:<150W;
通訊接口:以太網(wǎng)/RS485 串口;
4.3.2 手持式干擾槍
手持式干擾槍能夠方便快速的對目前進(jìn)行干擾。瞄準(zhǔn)精度高,干擾距離遠(yuǎn)。

4. .4軟件 管理平臺
反無人機(jī)系統(tǒng)平臺主界面如下圖。通過電子地圖,能夠直觀的對系統(tǒng)防范區(qū)域進(jìn)行管理。能夠在地圖上直觀了解系統(tǒng)探測情況、視頻跟顯示顯示和電磁干擾設(shè)備狀況。 作為一個智能和高性能的解決方案,我們提供了一個新的架構(gòu),所有相關(guān)信息集中在一個服務(wù)器上。集中式系統(tǒng)可以全面,復(fù)雜地安裝幾乎無限數(shù)量的傳感器。

在 PC 上系統(tǒng)管理平臺運(yùn)行基于瀏覽器,向用戶友好的 web 界面,使得使用者很容易配置系統(tǒng)。界面結(jié)構(gòu)清晰,使得用戶可以管理全面,復(fù)雜的系統(tǒng)。用戶可以準(zhǔn)確組織并用標(biāo)簽標(biāo)注適合需求的所有傳感器。此外,傳感器之間的切換方便,快捷。我們的智能類別識別軟件可根據(jù)每款無人機(jī)的特點(diǎn)比如大小、運(yùn)動、聲音等來分類每款探測到的無人機(jī)。防區(qū)電子地圖可以按比例尺縮放,并和防區(qū)圖配合,形成所見即所得的圖像界面,用戶對布防情況能夠一目了然。報警時,對應(yīng)防區(qū)自動彈出報警信息和視頻。在警報的情況下,無人機(jī)的位置實(shí)時顯示在站點(diǎn)地圖上。很容易協(xié)調(diào)應(yīng)對措施,可跟蹤無人機(jī)的來源。用戶友好的 Web 界面,使得用戶能夠輕松配置任何數(shù)量的前端探測設(shè)備或檢索照片或視頻等數(shù)據(jù)。監(jiān)視空域可在 PC 或平板電腦上實(shí)時查看。一個屏幕上多個現(xiàn)場視圖,檢測您的保護(hù)區(qū)。同時觀看不同來源的多個現(xiàn)場視圖。軟件可以配置各傳感器和探測前端的警報閾值來管理系統(tǒng)的靈敏度。此外,可以優(yōu)先考慮現(xiàn)場的不同區(qū)域。當(dāng)檢測到威脅時,系統(tǒng)將通過短信,電子郵件,網(wǎng)絡(luò)消息(TCP/ IP)通知,系統(tǒng)也可以集成到商用報警器系統(tǒng),通過簡單網(wǎng)關(guān)協(xié)議(SNMP)和這些系統(tǒng)聯(lián)動




最新資訊